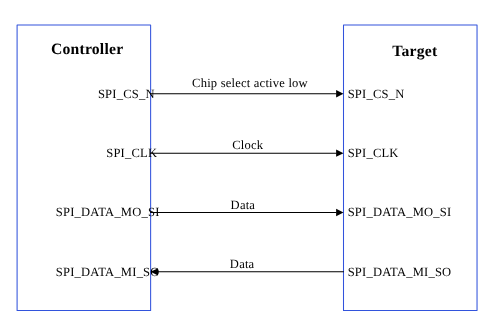
Figure : SPI data flow
The SPI core supports the bidirectional SPI standard, point-to-point, and controller-target protocol. The SPI core uses four chip‑select lines (SPI\_CS#\_N) to select target devices for communication. The following two data lines support the bidirectional data transfer. * SPI\_DATA\_MO\_SI: Controller data output, target data input. * SPI\_DATA\_MI\_SO: Controller data input, target data output. **Table :** **Data and control signals in SPI**| Data signals | MOSI: Controller data output, target data input. |
| MISO: Controller data input, target data output. | |
| Control signals | SCLK: A clock generated by the controller and input to all targets. |
| CS: Chip-select, a target is selected when the controller asserts its CS\_N signal. |
| Subsystem | Transfer mode | Description |
|---|---|---|
| Linux |
|
Supports a maximum configuration speed of 50 MHz. |
| Boot | FIFO |
|
| aDSP |
|
|
| File type | Description |
|---|---|
| Device tree source |
|
| `Pinctrl` settings |
|
| Qualcomm TEE settings |
|
| File type | Description |
|---|---|
| QUP v3 serial engine configuration |
|
| Qualcomm TEE settings |
|
| File type | Description |
|---|---|
| QUP v3 serial engine configuration |
|
| Firmware configuration settings |
|
| File type | Description |
|---|---|
| QUP v3 serial engine configuration |
|
| Qualcomm TEE settings |
|