

Overview
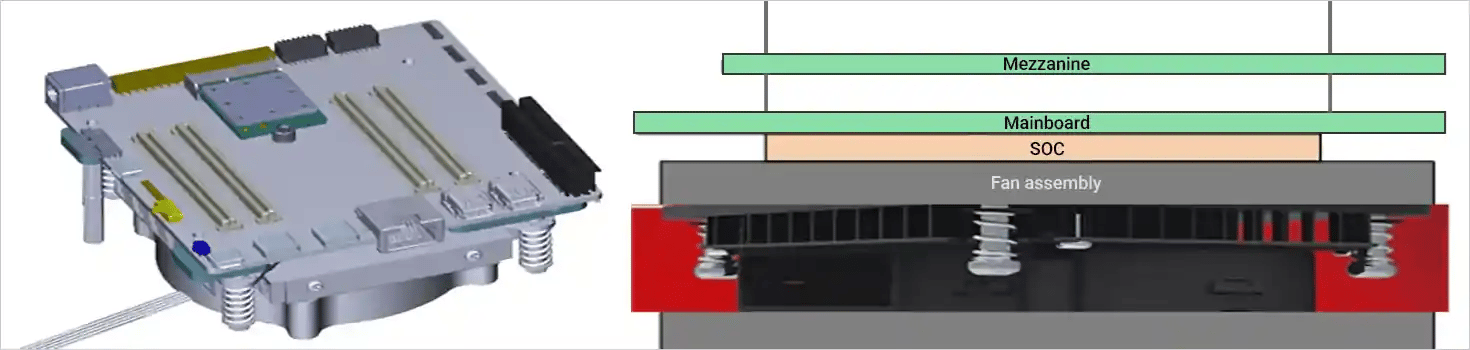
The fan controller regulates fan speed based on temperature inputs to ensure optimal thermal performance and energy efficiency. It supports multiple operating modes and can be configured dynamically through system nodes.Features
- Supports two operating modes: Manual and Automatic (Mode 2)
- Dynamic fan speed control based on temperature inputs
Operating Modes
| Mode | Description |
|---|---|
| Manual Mode (Mode 1) | Fan speed is manually set by the user. No automatic temperature-based control. |
| Automatic Mode (Mode 2) | Fan speed is automatically controlled based on remote temperature sensor readings. This is the currently enabled mode. |
How It Works
PWM Adjustment
Based on temperature, the controller adjusts the PWM signal (0–255) to control fan speed.
Mode Details and Validation
- Auto Mode (Mode 2)
- Manual Mode (Mode 1)
Description
In Auto Mode, fan speed is automatically controlled based on the remote temperature sensor (temp2_input). The system adjusts fan power and speed according to predefined temperature thresholds to ensure efficient cooling.Node Path
All relevant nodes are located under: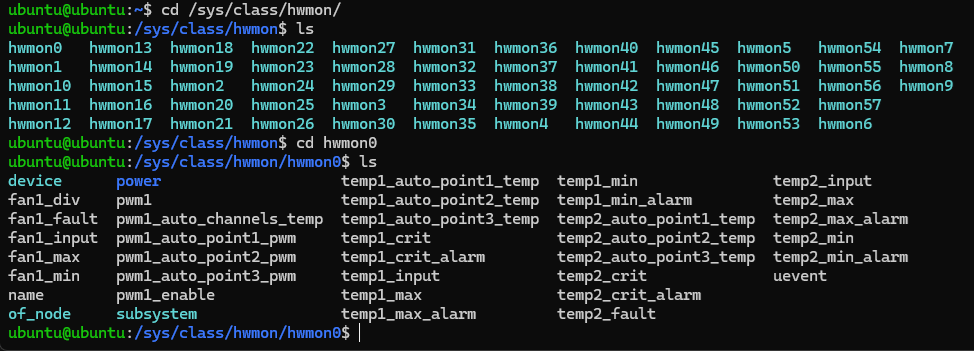
Temperature Thresholds
| Temperature Range (°C) | Node Values (millidegrees Celsius) | Fan Behavior | Power (PWM1) |
|---|---|---|---|
| Below 0°C | temp2_auto_point1_temp = 0 | Fan stops | 0 |
| 0°C – 48°C | temp2_auto_point1_temp to temp2_auto_point2_temp = 48000 | Fan runs at minimal speed | ~85 |
| 48°C – 58°C | temp2_auto_point2_temp to temp2_auto_point3_temp = 58000 | Fan runs at high speed | 255 |
Key Nodes
| Node | Purpose |
|---|---|
pwm1_enable | Set to 2 to enable Auto Mode |
temp2_input | Current remote temperature |
fan1_input | Current fan speed in RPM |
pwm1 | Current power input to the fan (0–255) |
temp2_auto_point1_temp | Lower threshold (fan off) |
temp2_auto_point2_temp | Mid threshold (low speed) |
temp2_auto_point3_temp | Upper threshold (high speed) |
Validation
For IQ-8275,
amc6821 is located at hwmon0, so X = 0.The actual hwmon number for the AMC6821 fan controller may vary. To determine the correct number:Expected output: